Drones That See Beyond Pixels: Unpacking Real-World Materials and Light
New research introduces MultiGP, a generative inverse rendering method that extracts object reflectance, texture, and scene illumination from a single image by leveraging shared lighting across multiple objects. This could give drones a deeper understanding of their environment.
TL;DR: A new method called MultiGP allows AI to disentangle the true material properties (reflectance, texture) of objects and the scene's global illumination from just one photograph. It achieves this by recognizing that all objects in a scene share the same lighting, offering a more complete perception than traditional 3D reconstruction.
Unveiling the World's True Radiance
Drone perception is usually about geometry: mapping surfaces, avoiding obstacles, building 3D models. But what if your drone could understand not just where things are, but what they are made of and how they are lit? A new paper, "Under One Sun: Multi-Object Generative Perception of Materials and Illumination," tackles exactly this. It introduces MultiGP, a system that takes a single image and, from it, can figure out the true reflectance and texture of multiple objects, alongside the complete illumination of the scene. This isn't just about pretty pictures; it’s about giving drones a deeper, more physically accurate understanding of the world.
The Disentanglement Dilemma
Current computer vision systems, even advanced ones, often struggle with a fundamental ambiguity: how light interacts with surfaces. A bright pixel could mean a brightly lit, dark surface, or a dimly lit, light-colored surface. Disentangling these — separating an object's intrinsic material properties (reflectance, texture) from the lighting that illuminates it — is a classic "inverse rendering" problem. Most existing methods either need multiple views, specialized hardware like active light sources, or make simplifying assumptions that limit accuracy. For a drone, adding more sensors means more weight, power consumption, and complexity. Relying on single-image solutions is ideal, but the ambiguity has been a massive hurdle, leading to models that might reconstruct shapes well but fail to grasp the true material characteristics or the environmental lighting.
Under One Sun: How MultiGP Cracks the Code
MultiGP's core insight is elegantly simple: while objects in a scene might have different textures and reflectances, they all share the same illumination. This shared lighting becomes a powerful constraint, helping the system resolve the inherent ambiguities of inverse rendering from a single image.
The process is cascaded, meaning it breaks down the problem into stages. First, a diffusion model estimates textures, accounting for how light bounces around. The system then transforms these texture-free appearances into reflectance maps. These maps, along with the input image, feed into a multi-object diffusion model, which is where the magic happens: it estimates the global illumination of the scene and the individual reflectances of each object.
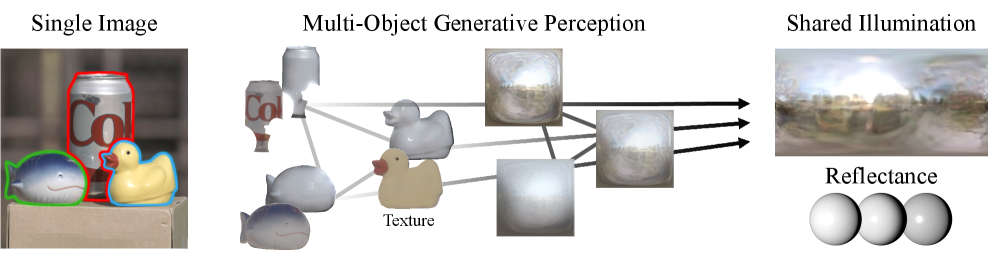 Figure 1: MultiGP's goal is to extract reflectance, texture, and scene illumination from a single image by exploiting shared lighting across multiple objects.
Figure 1: MultiGP's goal is to extract reflectance, texture, and scene illumination from a single image by exploiting shared lighting across multiple objects.
This multi-object diffusion model uses a few key technical innovations:
- Coordinated Guidance: This ensures that the diffusion model converges on a single, consistent illumination estimate across all objects. It's like having multiple witnesses describing the same event; their consistent reports strengthen the overall narrative.
- Axial Attention: This mechanism facilitates "cross-talk" between objects with different reflectance properties. It allows the system to compare how light affects different materials, further refining its understanding of both the materials and the light source.
- Texture Extraction ControlNet: Finally, a ControlNet refines the textures. This is crucial for preserving high-frequency details (like fine patterns or rough surfaces) while ensuring they remain physically consistent with the newly estimated lighting and reflectance.
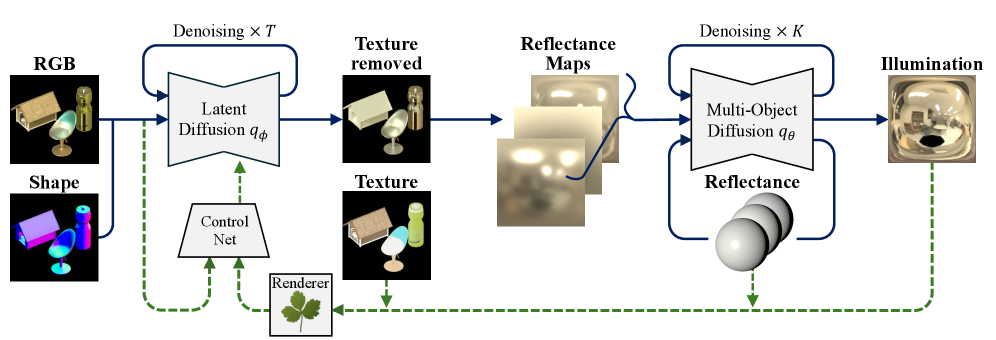 Figure 2: The MultiGP architecture processes an image in stages, first estimating textures, then reflectances and shared illumination, and finally refining textures for physical consistency.
Figure 2: The MultiGP architecture processes an image in stages, first estimating textures, then reflectances and shared illumination, and finally refining textures for physical consistency.
The cascaded approach, combining image-space and angular-space disentanglement, is a smart way to break down a complex problem. By first estimating textures and then refining them with knowledge of reflectance and illumination, MultiGP achieves a level of detail and consistency that single-shot methods often miss.
MultiGP's Performance: A Clearer Picture
The authors put MultiGP through its paces on standard datasets like Stanford-ORB and nLMVS-real, and the results are compelling. The method consistently outperforms existing baselines in accurately estimating both illumination and individual object textures.
- Illumination Fidelity: MultiGP faithfully captures the ground truth illumination structure with high-fidelity, significantly reducing logRMSE scores compared to other methods. This means the system doesn't just guess "bright light," but reconstructs the actual angular distribution and intensity of light sources in the environment. Figure 8 demonstrates this, showing how MultiGP's illumination estimates closely match the ground truth.
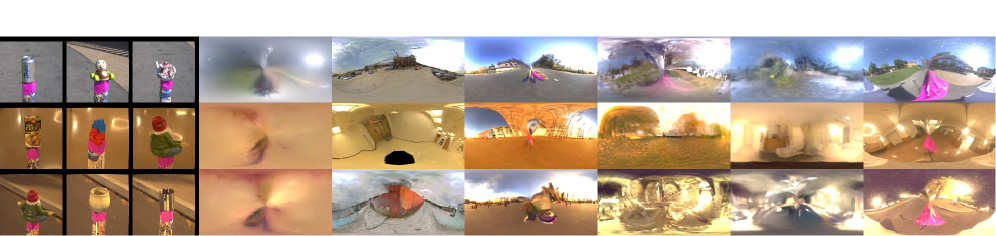 Figure 8: MultiGP accurately reconstructs scene illumination, showing high fidelity compared to ground truth on the Stanford-ORB dataset.
Figure 8: MultiGP accurately reconstructs scene illumination, showing high fidelity compared to ground truth on the Stanford-ORB dataset.
- Texture Accuracy: The system estimates highly accurate textures, crucially showing a lack of shading, which indicates successful disentanglement from lighting. This is a critical indicator that the system is indeed recovering the intrinsic surface properties. As shown in Figure 9, the textures are clean and detailed, free from the shadows and highlights that would typically bake into a raw image.
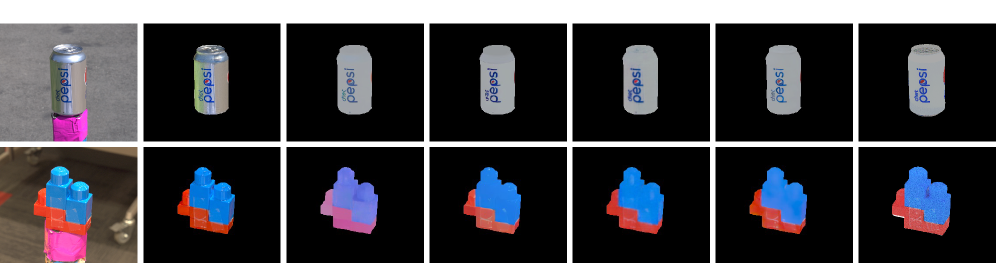 Figure 9: MultiGP's texture estimates are highly accurate and notably free of shading, confirming successful disentanglement from lighting.
Figure 9: MultiGP's texture estimates are highly accurate and notably free of shading, confirming successful disentanglement from lighting.
- Real-world Performance: On the nLMVS-real dataset, which features real-world captures, MultiGP again demonstrates superior performance in capturing accurate light structure, as illustrated in Figure 10. This suggests the method isn't just effective in controlled lab environments but generalizes well to complex real-world lighting conditions.
 Figure 10: On real-world data (nLMVS-real), MultiGP consistently provides the most accurate light structure estimates compared to baselines.
Figure 10: On real-world data (nLMVS-real), MultiGP consistently provides the most accurate light structure estimates compared to baselines.
The authors' approach effectively leverages the complementary spatial and frequency characteristics of multiple object appearances to recover individual texture and reflectance as well as the common illumination, confirming the strength of their multi-object constraint.
Why Your Drone Needs This Perspective
This research is a big step for drone autonomy and advanced perception. Right now, a drone might identify a "red car." With MultiGP, it could understand it as a "glossy red metallic car under direct sunlight with a clear sky." This deeper understanding has several implications:
- Enhanced Environmental Awareness: Drones could better interpret their surroundings for tasks like inspection, search and rescue, or environmental monitoring. Knowing material properties helps differentiate between, say, a wet rock and a dry one, or a metal pipe and a PVC pipe, even if they look similar in color.
- Realistic Digital Twins & Simulations: For industrial applications, accurately capturing materials and lighting means generating far more realistic digital twins for infrastructure, construction sites, or even entire cities. This data could feed into simulations for training autonomous systems or testing virtual modifications with high fidelity.
- Advanced Navigation & Interaction: Understanding surface reflectance could inform better path planning, especially for drones equipped with sensors like LiDAR or radar, as material properties significantly affect sensor returns. It could also enable drones to interact more intelligently with objects, perhaps identifying optimal points for grasping based on texture and grip.
- Augmented Reality & Visual Effects: A drone capturing a scene could then immediately allow you to virtually "re-light" it or "re-texture" objects in real-time AR overlays. This has huge potential for media production, architectural visualization, or even interactive art installations.
The Road Ahead: Limitations & What's Missing
While MultiGP is impressive, it's not a silver bullet. The abstract explicitly states it works "from a single image of known shapes." This is a significant limitation for general drone applications where shapes are often unknown and constantly changing. A drone would first need to perform accurate 3D reconstruction to provide these "known shapes" before MultiGP could do its work. This adds a computational burden and a dependency on other perception modules.
Furthermore, the paper doesn't detail performance metrics like inference speed or computational resource requirements. Diffusion models, while powerful, can be computationally intensive, potentially limiting real-time deployment on resource-constrained drone hardware. While the approach seems robust to real-world datasets, extreme lighting conditions (e.g., highly specular surfaces, very low light, complex atmospheric scattering) or highly transparent materials might still pose challenges. For practical deployment, the system would need to integrate seamlessly with existing 3D reconstruction pipelines and optimize for edge computing.
Building It Yourself: DIY Feasibility
Replicating MultiGP from scratch would be a substantial undertaking for a hobbyist. It involves sophisticated deep learning architectures, including cascaded diffusion models, ControlNets, and specialized attention mechanisms. This isn't a simple OpenCV script. A high-end GPU (like an NVIDIA RTX 4090 or better) would likely be a minimum requirement for training or even substantial inference. However, if the authors release pre-trained models and open-source their code (which is common for arXiv papers), then hobbyists with strong programming skills and access to powerful hardware might be able to experiment with it. The core ideas, however, are pushing the boundaries of current academic research, not simple to implement in a garage.
Connecting the Dots: Related Innovations
This paper connects to a broader trend of giving AI a richer understanding of the world. "Generation Models Know Space: Unleashing Implicit 3D Priors for Scene Understanding" by Wu et al., for instance, explores how Multimodal Large Language Models (MLLMs) can gain fine-grained spatial and geometric reasoning. If MultiGP provides the "what it's made of" and "how it's lit," then papers like Wu's provide the "where and how it's arranged." Together, they move us closer to drones that don't just see pixels, but truly understand their environment in a comprehensive, physically-grounded way.
Another fascinating connection is to generative models. If drones can perceive the world with such incredible radiometric detail, this rich data can feed into advanced generative models. "Cubic Discrete Diffusion: Discrete Visual Generation on High-Dimensional Representation Tokens" by Wang et al. investigates high-dimensional representation tokens for visual generation. This suggests a future where drone-perceived data could be used to create incredibly realistic virtual environments for simulation, training, or even digital twins, pushing the boundaries of what 'reality' a drone can interact with or generate based on its learned understanding.
Finally, for practical applications, consider "SAMA: Factorized Semantic Anchoring and Motion Alignment for Instruction-Guided Video Editing" by Zhang et al. With drones capturing vast amounts of video, and MultiGP enabling a deep understanding of a scene's materials and illumination, SAMA offers a powerful application for post-processing. A drone's footage, enriched by AI's understanding of material properties and lighting, could be intelligently edited to change surface appearances, adjust lighting effects, or even virtually 'test' different scenarios, all while maintaining realistic motion.
This convergence of accurate perception and intelligent generation is where the real power lies for future drone applications.
A New Era for Drone Vision
MultiGP pushes the envelope on what a single camera can tell us about the physical world, moving drones beyond mere geometric mapping to a nuanced understanding of materials and light, promising a new era for autonomous perception and interaction.
Paper Details
Title: Under One Sun: Multi-Object Generative Perception of Materials and Illumination Authors: Nobuo Yoshii, Xinran Nicole Han, Ryo Kawahara, Todd Zickler, Ko Nishino Published: Not explicitly stated arXiv: 2603.19226 | PDF
Written by
Mini Drone Shop AISharing knowledge about drones and aerial technology.