NanoBench: Advancing Nano-Quadrotor Research with Precision Data
NanoBench is a dataset for nano-quadrotors like the Crazyflie 2.1, enabling precise control, modeling, and state estimation with synchronized sub-millisecond data.
TL;DR: NanoBench is a precision dataset for nano-quadrotors, specifically the
Crazyflie 2.1, offering synchronized motor signals, onboard estimates, and ground truth. It addresses key challenges in system modeling, control, and state estimation for drones as light as 27 grams.
Tackling the Challenges of Nano-Quadrotors
Nano-quadrotors, such as the Crazyflie 2.1, are engineering marvels that pack impressive capabilities into a tiny 27-gram frame. However, working with these drones is far from straightforward. From nonlinear motor dynamics to noisy sensors and limited battery life, the challenges are numerous. This is where NanoBench comes in—a dataset specifically designed to address these issues. With over 170 flight trajectories and synchronized data from actuators to ground-truth motion capture, NanoBench is a game-changer for engineers and researchers looking to push the boundaries of nano-drone performance.
Why Existing Datasets Aren’t Enough
The majority of drone datasets are tailored for larger platforms, such as DJI drones or Pixhawk-based systems. These datasets often fall short when applied to nano-drones, for several reasons:
- Scale Differences: Nano-drones operate in a low-Reynolds number regime, which significantly alters their aerodynamic behavior compared to larger drones.
- Incomplete Data: Many datasets lack critical details, such as motor PWM signals or onboard controller data, which are essential for fine-tuning nano-drones.
- Control Challenges: Standard control models often fail to account for the unique characteristics of coreless DC motors and ultra-light frames, making precise control difficult.
Without a dataset like NanoBench, developing advanced controllers, estimators, or machine learning models for nano-drones often involves a lot of trial and error.
What Makes NanoBench Unique?
NanoBench stands out for its focus and depth. The dataset is built around real-world flights of the Crazyflie 2.1 nano-quadrotor, captured using a Vicon motion capture system. Here’s what it offers:
- 170+ Flight Trajectories: These include a variety of scenarios such as hovering, multi-frequency excitation, geometric tracking, and aggressive maneuvers.
- Synchronized Data Streams: The dataset provides ground truth from Vicon, raw IMU data, PID controller internals, motor PWM commands at 100 Hz, and battery telemetry at 10 Hz, all synchronized to within 0.5 milliseconds.
- Three Core Benchmark Tasks:
- System Identification: Develop accurate models of quadrotor dynamics.
- Controller Benchmarking: Compare the performance of different closed-loop control algorithms.
- State Estimation: Evaluate onboard estimators like EKF under various conditions.
Visual Insights from NanoBench
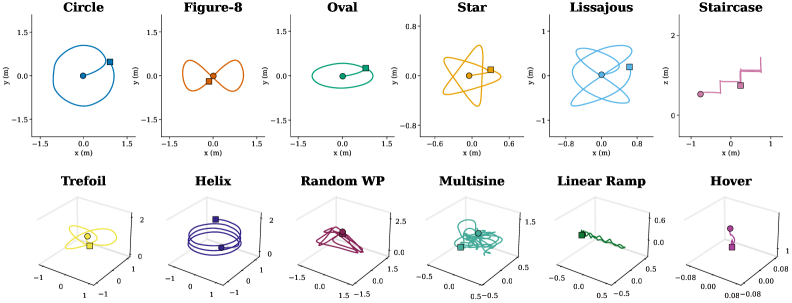
Figure 1: Trajectories grouped into excitation (A), geometric tracking (B), and battery-drain hover (C).
The dataset’s detailed trajectories make it easier to analyze flight dynamics, especially during aggressive maneuvers or long-duration battery tests.
Key Findings from the Dataset
The authors of NanoBench didn’t just release the data—they also conducted experiments to establish baseline results for the three benchmark tasks. Here’s what they found:
1. System Identification
Hybrid models, which combine physics-based and data-driven approaches, outperformed purely physics-based or data-driven models. While prediction error increased with longer horizons, hybrid models consistently showed the lowest cumulative error.
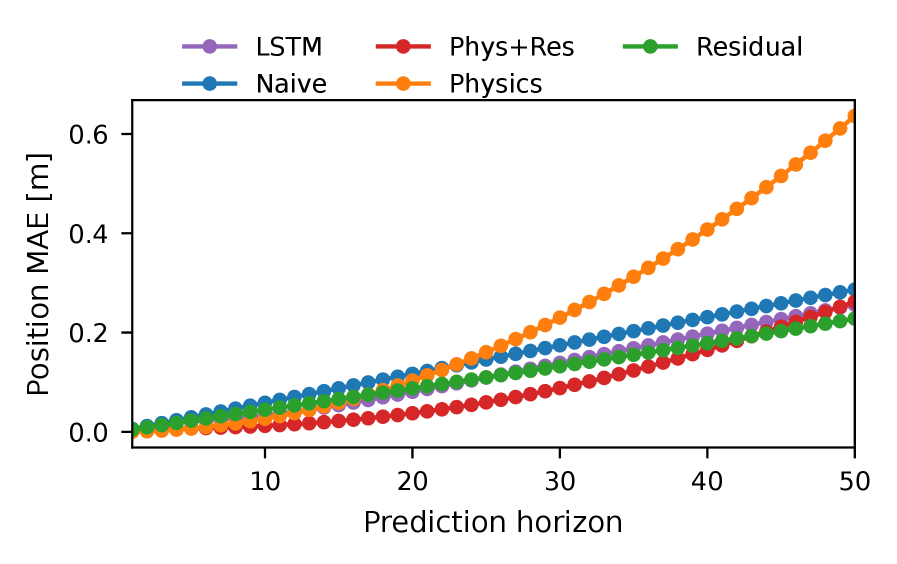
Figure 2: Position error increases over time, but hybrid models maintain lower error than others.
2. Controller Benchmarking
Offline machine learning-based controllers, such as MLP and LSTM, produced smoother trajectories compared to traditional PID and Mellinger controllers used in real flight.
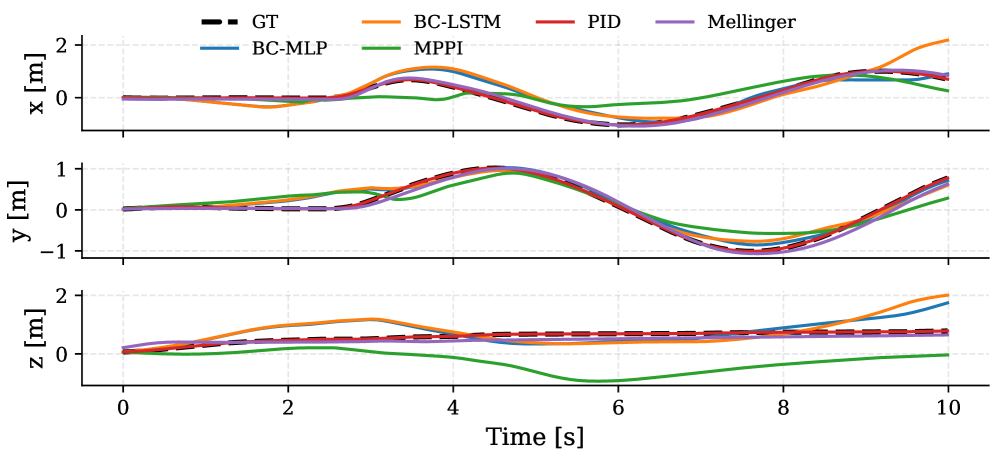
Figure 4: Comparing closed-loop position control performance for various controllers.
3. State Estimation
The Extended Kalman Filter (EKF) performed well at low and medium speeds, maintaining bounded error. However, its performance deteriorated at higher speeds, highlighting the need for improved estimation techniques.
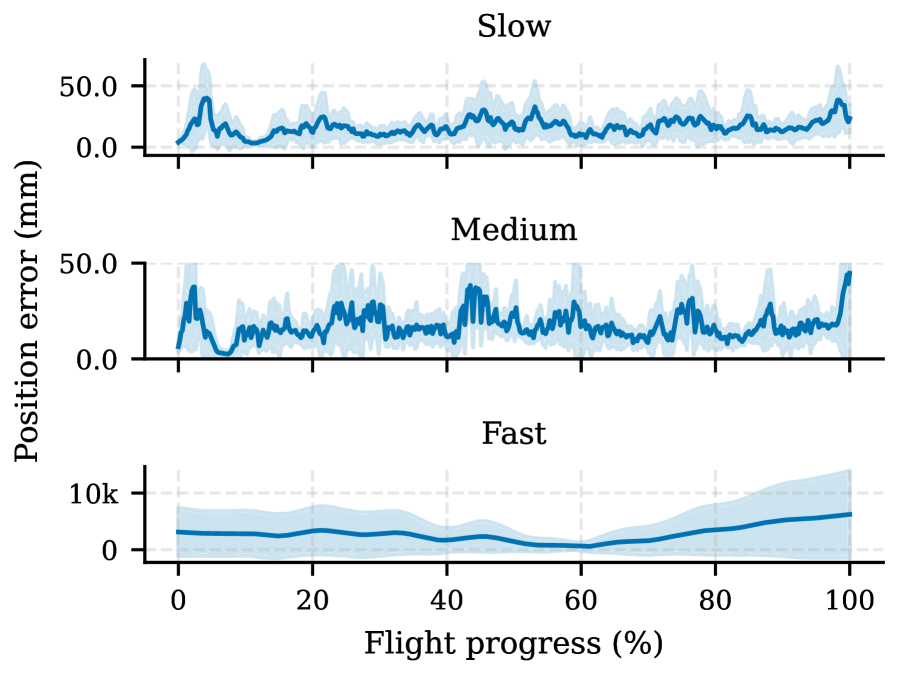
Figure 6: EKF's position error increases at higher speeds.
Why NanoBench Matters
NanoBench is more than just an academic exercise—it has practical applications for advancing nano-drone technology:
- Enhanced Controllers: The dataset provides the tools needed to develop controllers capable of handling complex maneuvers and compensating for battery drain.
- Improved State Estimation: With data on EKF performance under various conditions, researchers can design better filters or use machine learning to enhance onboard sensing.
- Accessibility: By focusing on the widely available
Crazyflie 2.1, NanoBench democratizes high-fidelity drone research, making it accessible to both professionals and hobbyists. - Optimized Energy Use: Detailed battery telemetry allows for better understanding and management of energy consumption during flight.
Limitations to Consider
While NanoBench is a significant step forward, it’s not without its limitations:
- Single Platform: The dataset is specific to the
Crazyflie 2.1, which may limit its applicability to other nano-quadrotors. - Resource Requirements: Access to a Vicon motion capture system is needed for ground-truth data, which may not be feasible for all users.
- Simplified Scenarios: The dataset doesn’t account for real-world challenges like occlusions, GPS denial, or environmental disturbances such as airflow.
- Battery Analysis: While battery telemetry is included, the dataset doesn’t provide in-depth analysis of battery discharge effects.
Opportunities for Innovation
If you’re working with the Crazyflie 2.1, NanoBench offers a robust starting point for research and development. The dataset and associated code are open-source, making it accessible to a wide audience. Even without a motion capture system, the onboard IMU and EKF data can be used for prototyping and testing.
Related Research
NanoBench is part of a growing ecosystem of tools and datasets for drone research. Here are some complementary works:
- ReCoSplat (arXiv:2603.09968): Introduces Gaussian splatting for real-time 3D mapping, which could enhance NanoBench’s trajectory data with advanced visual-inertial mapping.
- BEACON (arXiv:2603.09961): Focuses on language-conditioned navigation in occluded environments, a potential area for future NanoBench integration.
- Efficient Beam Training (arXiv:2603.09893): Explores adaptive near-field communication, which could improve real-time data transfer and control for nano-drones.
Final Thoughts
NanoBench is a groundbreaking resource for the nano-quadrotor community. By addressing the unique challenges of these tiny drones, it paves the way for advancements in control, modeling, and state estimation. The question now is: what innovative solutions will this dataset inspire?
Paper Details
Title: NanoBench: A Multi-Task Benchmark Dataset for Nano-Quadrotor System Identification, Control, and State Estimation
Authors: Syed Izzat Ullah, Jose Baca
Published: March 2023
arXiv: 2603.09908 | PDF
Written by
The Flight DeskSharing knowledge about drones and aerial technology.
More from Mini Drone Shop
Stop Wandering: Metacognitive AI Makes Drones Smarter, Not Just Faster

Unmasking the Invisible: Polarization Powers Drone Camouflage Detection
Smarter Drone Comms: AI-Powered Beams Cut Through the Noise
