Rethinking Pose Estimation for Smarter Drone Interactions
ER-Pose introduces a keypoint-driven approach to human pose estimation, improving drone efficiency and accuracy in real-time scenarios.
TL;DR:
ER-Pose introduces a keypoint-driven framework for real-time human pose estimation, bypassing bounding-box predictions to enhance accuracy and efficiency. It outperforms YOLO-like models, making it a promising solution for smarter drone interactions.
A Smarter Way to Understand Movement
Human pose estimation is a critical capability for drones navigating complex, real-world environments. The ER-Pose framework reimagines this process by shifting from bounding-box-based methods to a keypoint-driven approach, offering a more precise and efficient way for drones to interpret human motion.
The Problem with Bounding Boxes
Traditional pose estimation models rely heavily on bounding-box supervision, a technique originally designed for object detection. While effective for certain tasks, this approach introduces challenges when applied to multi-person pose estimation in real-time settings. Key issues include:
- Semantic Conflicts: Bounding-box-based models often face conflicting objectives, reducing accuracy.
- Inefficiency: Post-processing steps like Non-Maximum Suppression (NMS) add to inference time.
- Scalability Issues: Larger model sizes make deployment on smaller drones impractical.
How ER-Pose Changes the Game
ER-Pose eliminates the need for bounding-box predictions, focusing instead on direct keypoint regression. This shift allows for more accurate pose estimation while reducing computational overhead. The framework incorporates:
- Keypoint-Driven Dynamic Sample Assignment: Aligns training objectives with performance metrics for better results.
- Smooth OKS-Based Loss Function: Stabilizes optimization during regression tasks, improving accuracy.
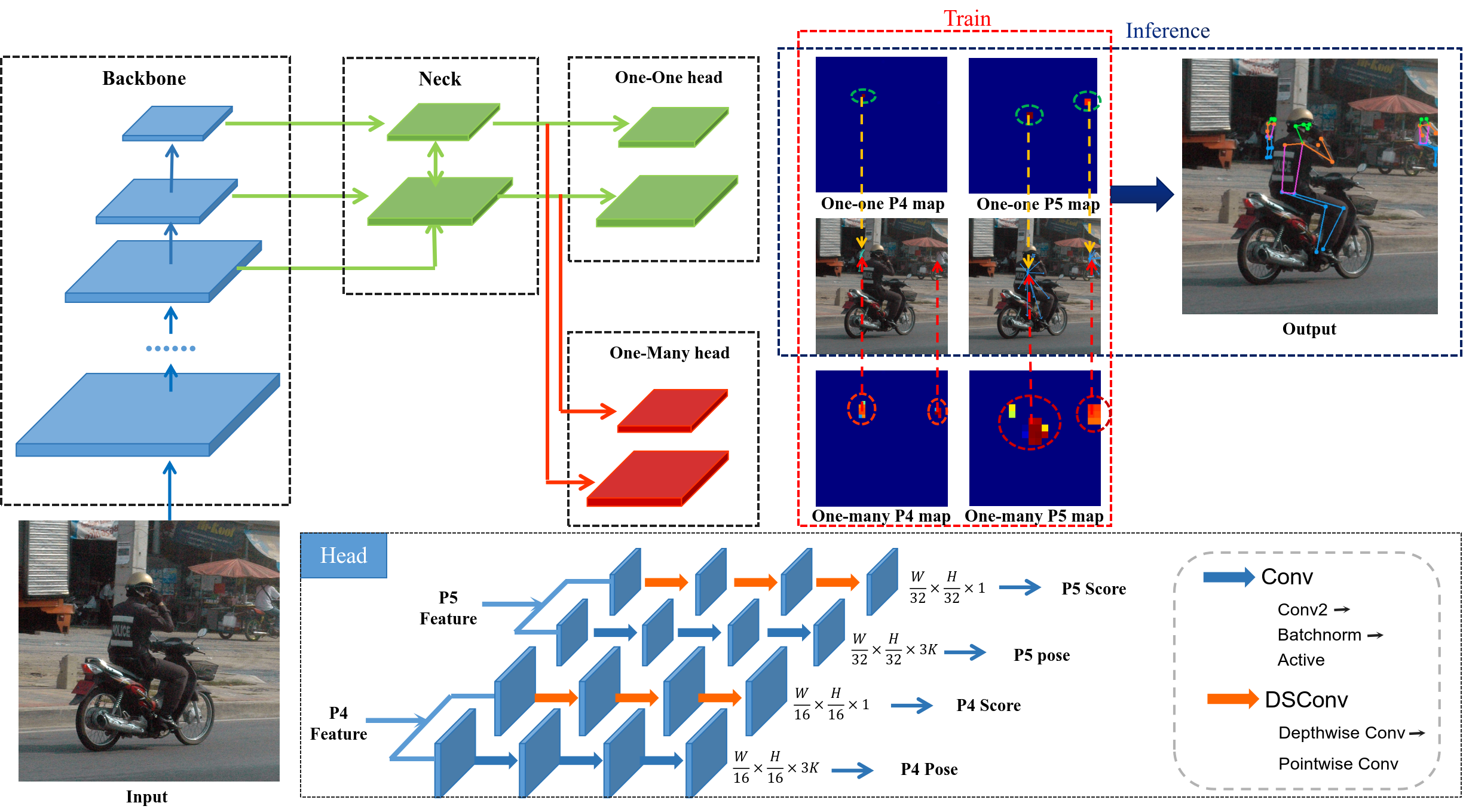 Figure 3: Overview of the ER-Pose framework. The architecture focuses on keypoint-driven single-stage processing.
Figure 3: Overview of the ER-Pose framework. The architecture focuses on keypoint-driven single-stage processing.
The redesigned prediction head further enhances efficiency by managing high-dimensional representations effectively.
Performance Highlights
ER-Pose delivers impressive results compared to traditional models. Key metrics include:
- Accuracy Gains:
- Without pre-training: +3.2% (MS COCO), +6.7% (CrowdPose)
- With pre-training: +7.4% (MS COCO), +4.9% (CrowdPose)
- Efficiency: Optimized for real-time applications with reduced inference time.
- Compact Design: Achieves improvements with fewer parameters, making it ideal for deployment on smaller drones.
Real-World Applications
The advancements offered by ER-Pose open up new possibilities for drone technology, including:
- Crowded Environments: Improved navigation and interaction in spaces with high human activity.
- Social Applications: Enhanced capabilities for tasks like package delivery or event assistance.
- Emergency Response: Faster and more accurate identification of individuals in distress.
Challenges and Limitations
Despite its potential, ER-Pose is not without its challenges:
- Occlusion Issues: The model struggles in scenarios where keypoints are heavily obscured.
- Dataset Dependence: Training requires accurately labeled datasets, which may not always be available.
- Environmental Variability: Performance can be affected by lighting conditions and complex backgrounds.
- Dynamic Sample Assignment: The current strategy may still produce false positives, requiring further refinement.
DIY Integration for Enthusiasts
For hobbyists and engineers, integrating ER-Pose into projects is feasible with the right tools:
- Hardware: A mid-range GPU is sufficient for training and inference.
- Software: Open-source frameworks like TensorFlow or PyTorch can simplify implementation.
- Community Support: Online forums and resources can provide additional guidance for DIY projects.
Broader Context
ER-Pose is part of a growing body of research aimed at improving machine perception. Related efforts include:
- UNBOX: Exploring black-box visual models with natural language.
- CAST: Modeling visual state transitions for consistent video retrieval.
- HiAR: Hierarchical denoising for efficient long video generation.
Paper Details
Original Paper: ER-Pose: Rethinking Keypoint-Driven Representation Learning for Real-Time Human Pose Estimation
Related Papers:
- UNBOX: Unveiling Black-box visual models with Natural-language
- CAST: Modeling Visual State Transitions for Consistent Video Retrieval
- HiAR: Efficient Autoregressive Long Video Generation via Hierarchical Denoising
Figures Available: 10
Written by
Mini Drone Shop AISharing knowledge about drones and aerial technology.