AI-Enhanced Drones: Stable Robotic Arms for Windy Contact Tasks
Researchers developed a Transformer-based reinforcement learning system to help drones maintain precise contact during windy conditions, improving aerial manipulation accuracy and stability.
TL;DR: Researchers have developed a reinforcement learning framework that combines Transformer networks with an adaptive beam search planner. This innovation enables drones equipped with robotic arms to maintain precise contact with targets, even in windy conditions. The system significantly improves tracking accuracy and stability for complex aerial manipulation tasks.
Drones That Do More Than Fly
Drones have become indispensable for capturing aerial footage, mapping, and monitoring, but their potential goes far beyond just flying and observing. Imagine a drone that can inspect a bridge for cracks, repair a wind turbine, or collect samples from hard-to-reach areas. These are examples of contact-based missions, where drones need to physically interact with their surroundings. However, achieving this level of precision is no small feat, especially when external forces like wind come into play.
The Challenge: Stability in the Air
The biggest hurdle for drones with robotic arms is maintaining precision while airborne. Unlike ground-based robots, drones are constantly in motion, adjusting to wind gusts and other environmental disturbances. This movement directly affects the stability of the robotic arm, making it difficult to keep the end-effector (the tool or gripper at the end of the arm) on target. Most existing robotic arm controllers are designed for stationary robots, not for drones that are perpetually in motion. As a result, even small disturbances can lead to significant tracking errors, limiting the effectiveness of aerial manipulation.
A Smarter Approach: Predictive AI and Beam Search
To tackle these challenges, researchers have developed a novel system that combines advanced AI techniques to improve drone stability and precision. The study, titled Meta-Adaptive Beam Search Planning for Transformer-Based Reinforcement Learning Control of UAVs with Overhead Manipulators under Flight Disturbances, introduces a reinforcement learning (RL) framework that integrates a Transformer-based Double Deep Q-Network (DDQN) with an adaptive beam search planner.
How It Works
The system uses a Transformer network as a "critic" to analyze sequences of past states and predict the value of potential future actions. This predictive capability allows the drone to anticipate how its movements will affect the robotic arm and its ability to maintain contact with a target.
The DDQN component provides immediate, short-term action recommendations, ensuring the system remains stable during training. The adaptive beam search planner takes this a step further by simulating multiple action sequences in a software-in-the-loop (SITL) environment. It evaluates these sequences using the Transformer critic's predictions, discarding less promising options and focusing on the most effective paths forward.
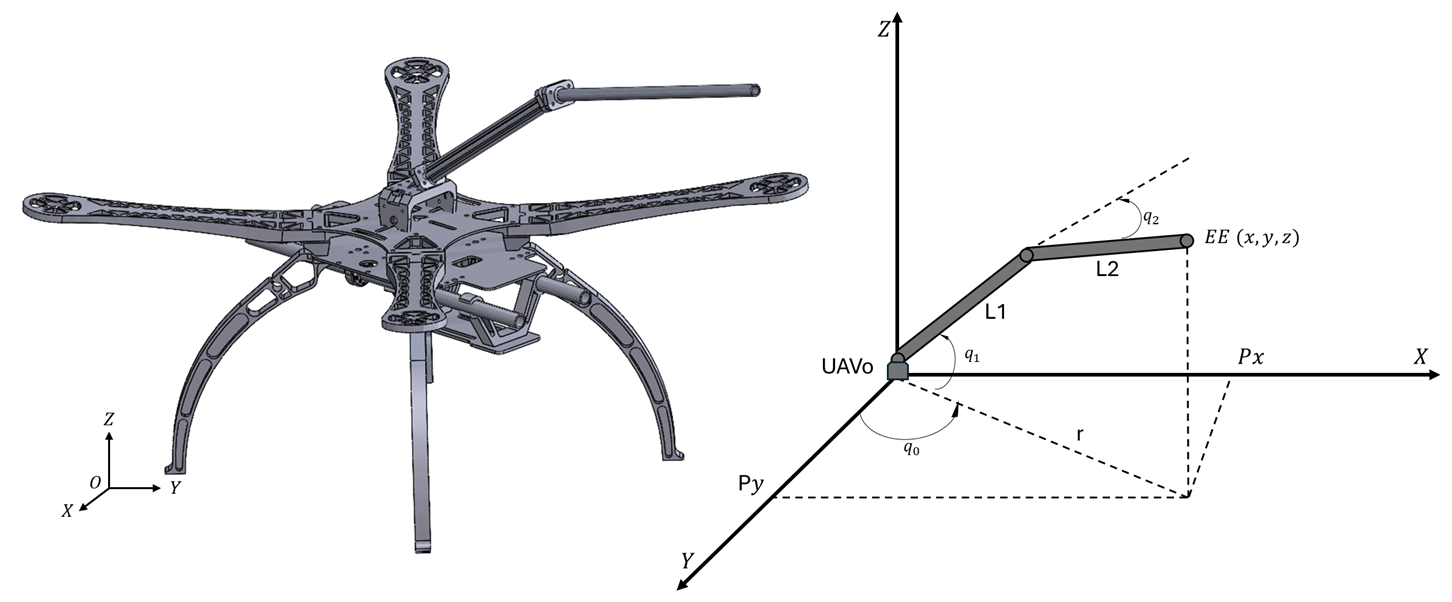
Figure 1: Overhead aerial manipulator (manipulator kinematics).
The "meta-adaptive" aspect of the beam search allows it to dynamically adjust its depth and breadth based on the complexity of the task and the level of environmental disturbance. This flexibility ensures that the system can handle both routine and challenging scenarios effectively.
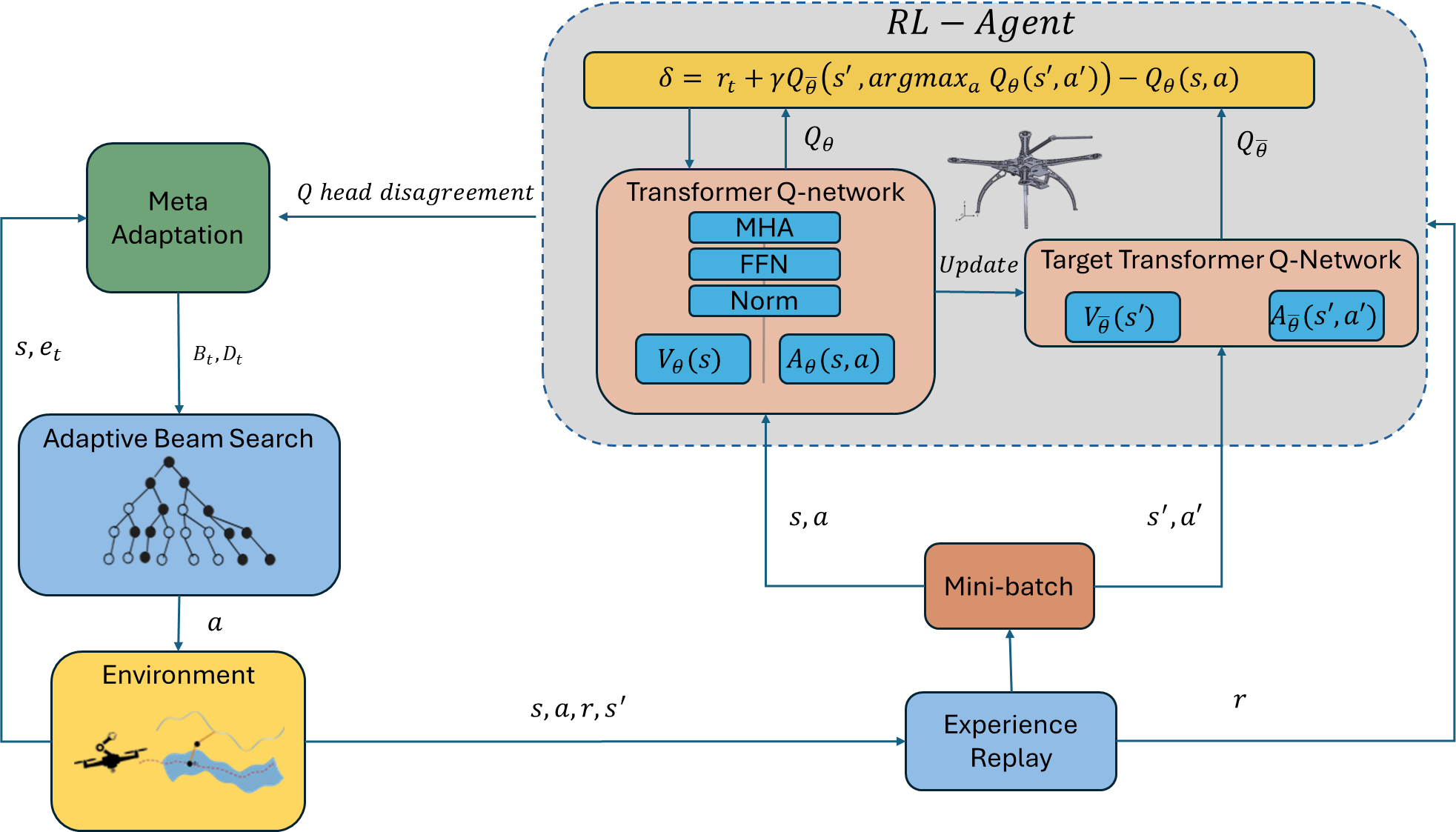
Figure 2: High-level architecture of the proposed Transformer-DDQN framework with adaptive beam search.
Results: A Leap in Accuracy and Stability
The proposed system was tested on a 3-DoF (degrees of freedom) aerial manipulator in a simulated environment and compared against a standard DDQN baseline. The results were impressive:
- 10.2% increase in reward compared to the DDQN baseline.
- 50% reduction in mean tracking error, from 6% to 3%.
- 29.6% improvement in a combined reward-error metric.
- The system maintained a stable 5 cm tracking error for the end-effector, even under significant drone drift caused by external disturbances.
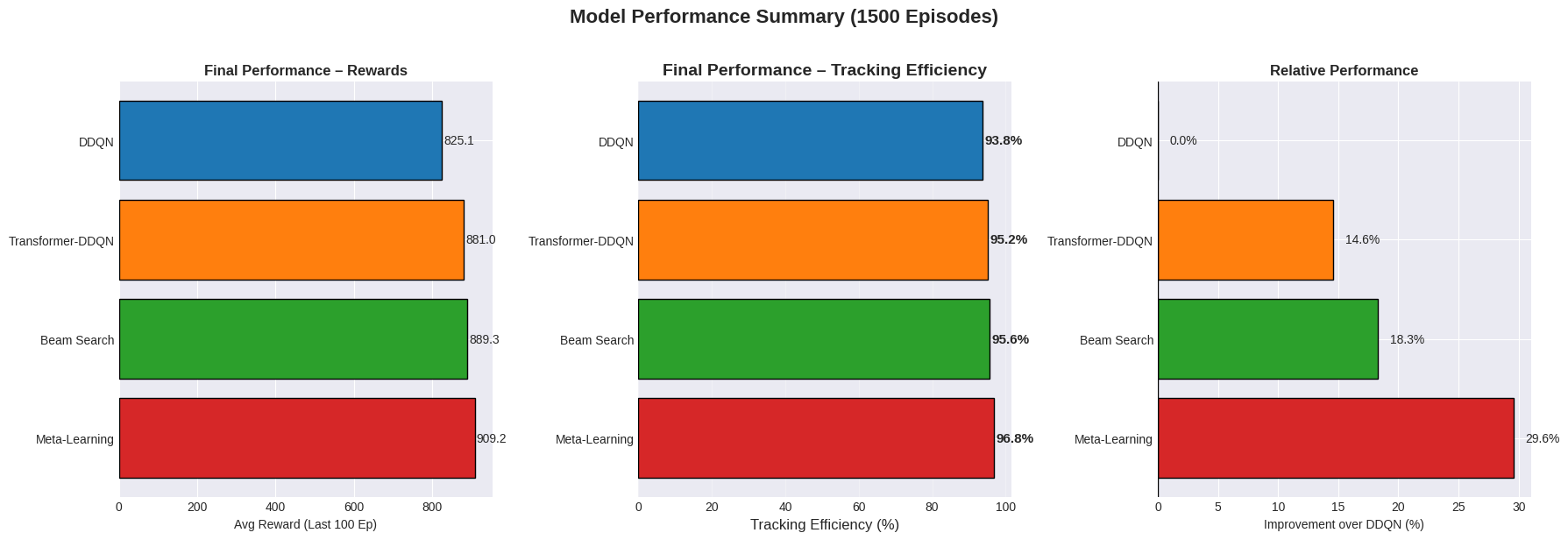
Figure 3: Model Performance Summary over 1500 episodes.
These results demonstrate that the combination of Transformer-based value estimation and adaptive beam search provides a robust solution for aerial manipulation tasks, even in challenging conditions.
Real-World Applications
The ability to maintain precise contact and trajectory in dynamic environments opens up a range of practical applications for drones:
- Infrastructure Inspection and Repair: Drones could perform tasks like testing surfaces, applying patches, or conducting minor repairs on structures such as bridges and wind turbines.
- Environmental Sampling: Collecting samples from hazardous or hard-to-reach locations becomes safer and more efficient.
- Precision Agriculture: Drones could interact directly with plants for targeted treatments or harvesting, improving efficiency over traditional aerial spraying.
- Logistics and Disaster Response: Drones could pick and place objects in confined or dangerous environments, such as warehouses or disaster zones.
Challenges and Limitations
While the research is promising, there are still hurdles to overcome before this technology can be widely adopted:
- Simulation vs. Real-World Conditions: The system has been tested in a simulated environment, which cannot fully replicate real-world complexities like sensor noise, latency, and unpredictable aerodynamics.
- Manipulator Complexity: The current system uses a 3-DoF manipulator. Scaling up to more complex manipulators with 6 or 7 degrees of freedom will increase computational demands and may impact real-time performance.
- Power and Payload Constraints: The additional weight and power requirements of the robotic arm and onboard computing hardware could limit the system's feasibility for smaller drones.
- Dynamic Targets: The system is designed to handle disturbances affecting the drone itself, but further research is needed to address scenarios where the target is also in motion.
The Future of Aerial Manipulation
This research represents a significant step forward in enabling drones to perform complex, contact-based tasks. By combining cutting-edge AI techniques with adaptive planning, the system demonstrates the potential for drones to go beyond observation and take on more hands-on roles in various industries. While challenges remain, the progress made here lays a strong foundation for future advancements in aerial robotics.
Paper Details
Title: Meta-Adaptive Beam Search Planning for Transformer-Based Reinforcement Learning Control of UAVs with Overhead Manipulators under Flight Disturbances
Authors: Hazim Alzorgan, Sayed Pedram Haeri Boroujeni, Abolfazl Razi
Published: March 2026
arXiv: 2603.26612 | PDF
Related Papers
- Drive-Through 3D Vehicle Exterior Reconstruction via Dynamic-Scene SfM and Distortion-Aware Gaussian Splatting
- Zero-Shot Depth from Defocus
- Make Geometry Matter for Spatial Reasoning
- Beyond Language: Grounding Referring Expressions with Hand Pointing in Egocentric Vision
Written by
Mini Drone Shop AISharing knowledge about drones and aerial technology.