Drones That 'Think' How to Think: Smarter AI for Autonomous Flight
New research introduces `Metis`, an agentic AI model that intelligently decides when to use internal knowledge versus external tools, significantly reducing computational overhead while boosting reasoning accuracy for autonomous systems.
TL;DR: Agentic AI models often waste resources by blindly calling external tools, even for simple tasks. This new research proposes
HDPO, a training framework that teaches models likeMetisto think meta-cognitively, deciding when to process internally and when to leverage external utilities. The result is drastically fewer tool invocations and improved accuracy, paving the way for more efficient and reliable autonomous drones.
Beyond Reaction: Drones That Reason About Reasoning
For drone hobbyists and engineers, every millisecond of processing time and every watt of power matters. We're constantly pushing the boundaries of what autonomous drones can do, from complex navigation to real-time object identification. But what if your drone didn't just do these tasks, but intelligently decided the best way to do them? This new paper introduces a critical step towards drones that can "think about thinking," making smarter choices about how to leverage their own onboard AI versus tapping into more powerful, but resource-intensive, external tools.
The Cost of Blind Ambition
Current agentic multimodal models, the brains behind many advanced AI systems, including those that could pilot future drones, suffer from a fundamental flaw: they're often too eager to use external tools. Whether it's complex code execution, a web search, or cloud-based image analysis, these models frequently invoke these utilities even when a task could be resolved directly from their existing knowledge or raw sensor data. This isn't just inefficient; it's a critical bottleneck.
Every unnecessary tool call adds latency, consumes precious power, and can introduce noise that derails accurate reasoning. For a drone, this translates directly to shorter flight times, slower reaction speeds, and potentially unreliable decision-making in critical situations. Existing attempts to fix this using basic penalty systems in reinforcement learning have fallen short, either suppressing essential tool use or being too weak to make a real difference.
Cultivating Cognitive Restraint with HDPO
The core innovation here is HDPO (Hybrid Decoupled Policy Optimization), a framework that teaches an agent to arbitrate tool use strategically. Instead of trying to balance accuracy and efficiency with a single, scalar reward (which is like trying to optimize two different things with one knob), HDPO decouples them. It creates two distinct optimization channels: one solely focused on maximizing task correctness, and another dedicated to enforcing execution economy. This efficiency channel only kicks in after the agent has learned to solve the task accurately, ensuring it refines its self-reliance without sacrificing performance.
The result of training with HDPO is Metis, a strategic multimodal reasoning agent. Metis doesn't just react; it evaluates. It determines when a query can be resolved using its internal visual understanding and prior knowledge, and when it genuinely needs to invoke an external tool like a code interpreter, text search, or image search.
Here’s how HDPO drastically improves efficiency and performance:
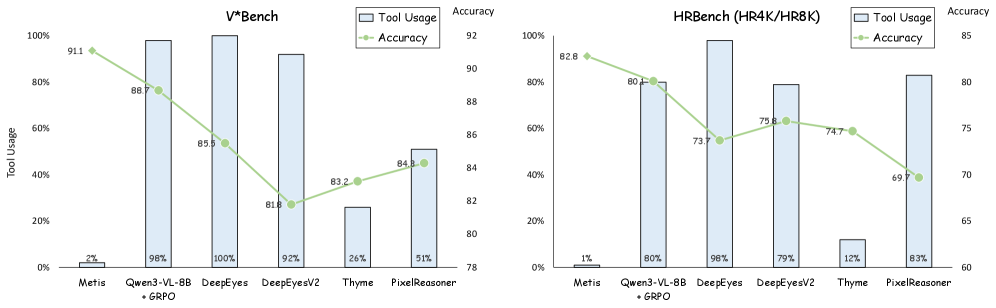 Figure 1: Comparison of tool-use efficiency and task performance. Existing methods rely heavily on tool calls, reflecting limited efficiency awareness. In contrast, our method uses tools far more selectively while achieving the best overall performance, showing that strong accuracy and high efficiency can be attained simultaneously.
Figure 1: Comparison of tool-use efficiency and task performance. Existing methods rely heavily on tool calls, reflecting limited efficiency awareness. In contrast, our method uses tools far more selectively while achieving the best overall performance, showing that strong accuracy and high efficiency can be attained simultaneously.
This decoupled approach is key. Traditional methods merge accuracy and efficiency, often leading to compromises. HDPO keeps them separate during optimization and combines them at the final loss, enabling more strategic decisions.
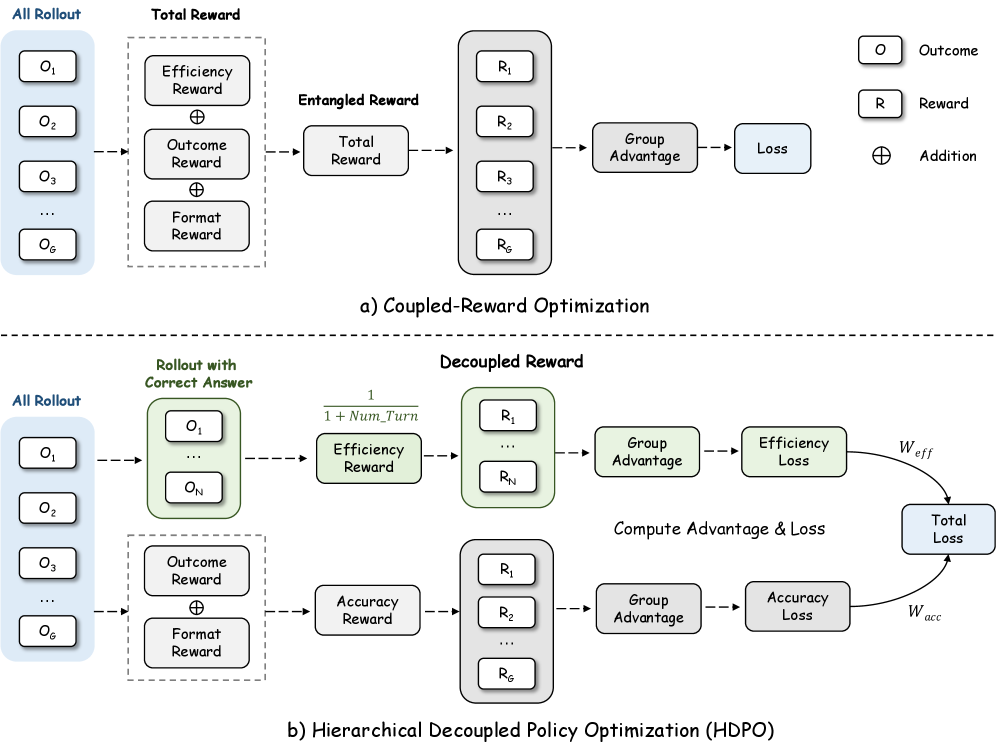 Figure 2: Comparison between coupled-reward optimization and HDPO. Existing methods entangle accuracy and efficiency into a single reward signal, while HDPO decouples them into separate branches and combines them only at the final loss, enabling more strategic tool use.
Figure 2: Comparison between coupled-reward optimization and HDPO. Existing methods entangle accuracy and efficiency into a single reward signal, while HDPO decouples them into separate branches and combines them only at the final loss, enabling more strategic tool use.
Metis then applies this strategic thinking to a range of multimodal tasks, as shown in its architecture:
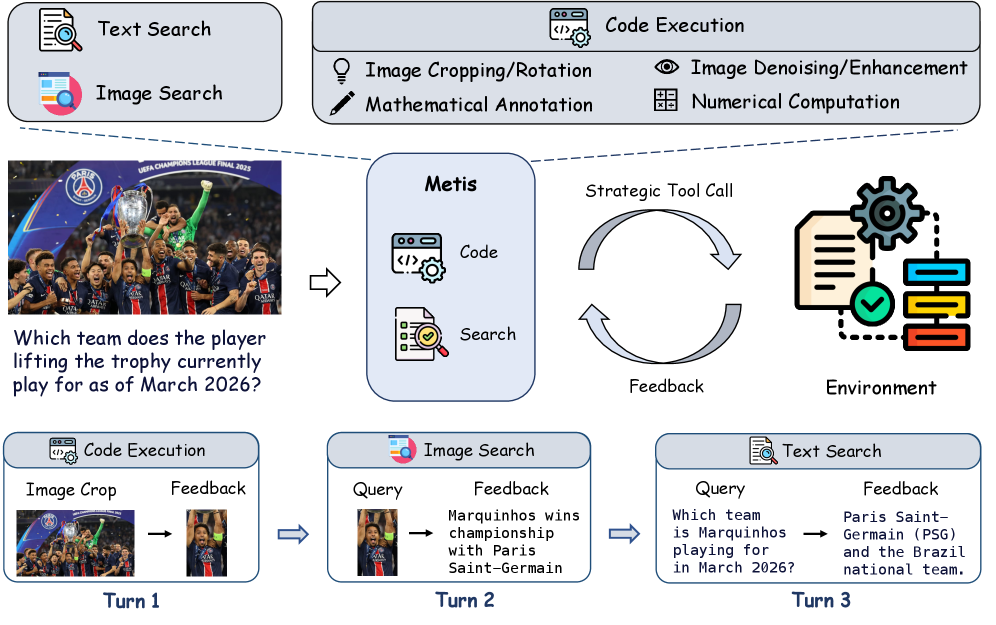 Figure 3: Overview of Metis. A strategic multimodal reasoning agent that selectively invokes code execution, text search, and image search tools during multi-turn reasoning. Rather than invoking tools by default, Metis adaptively determines when tool interactions provide genuinely useful evidence, and otherwise reasons directly from the available context to obtain the final answer.
Figure 3: Overview of Metis. A strategic multimodal reasoning agent that selectively invokes code execution, text search, and image search tools during multi-turn reasoning. Rather than invoking tools by default, Metis adaptively determines when tool interactions provide genuinely useful evidence, and otherwise reasons directly from the available context to obtain the final answer.
For instance, if a drone's camera captures information that can be readily understood, Metis processes it directly, avoiding costly tool calls.
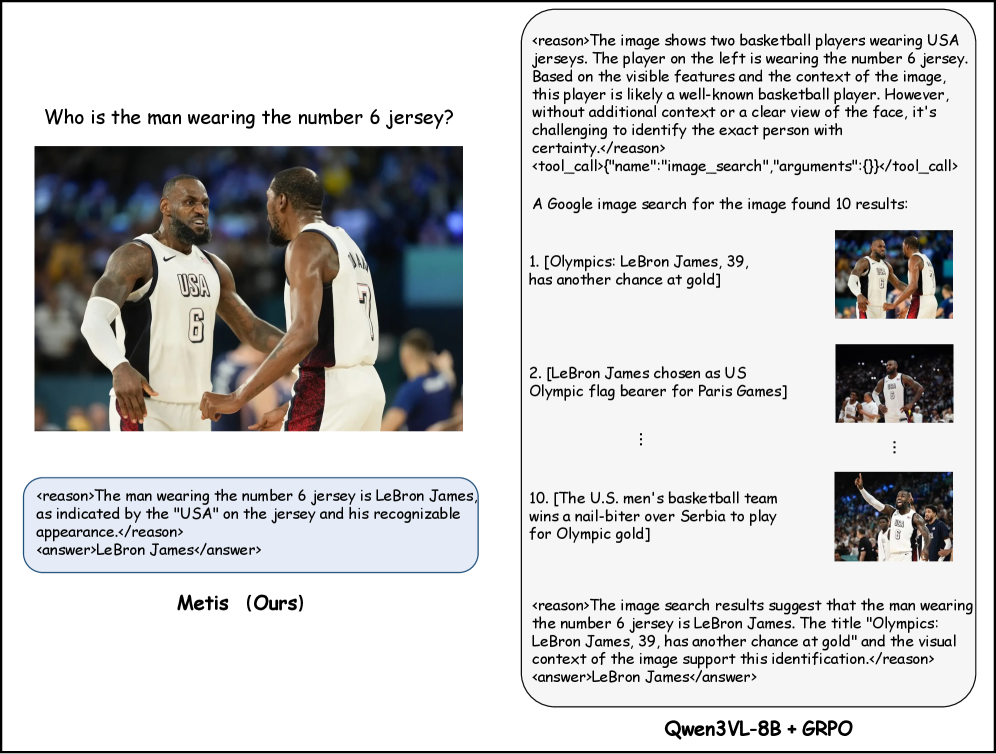 Figure 4: Direct reasoning from visual context. The query can be resolved through visual understanding and prior knowledge alone. Metis abstains from tool invocation and answers directly, exemplifying the meta-cognitive restraint instilled by HDPO.
Figure 4: Direct reasoning from visual context. The query can be resolved through visual understanding and prior knowledge alone. Metis abstains from tool invocation and answers directly, exemplifying the meta-cognitive restraint instilled by HDPO.
However, if a task requires analyzing a tiny detail in a complex sensor reading, Metis knows when to invoke a specific code tool to crop and enlarge that region for finer analysis. This selective action is crucial for tasks requiring high precision.
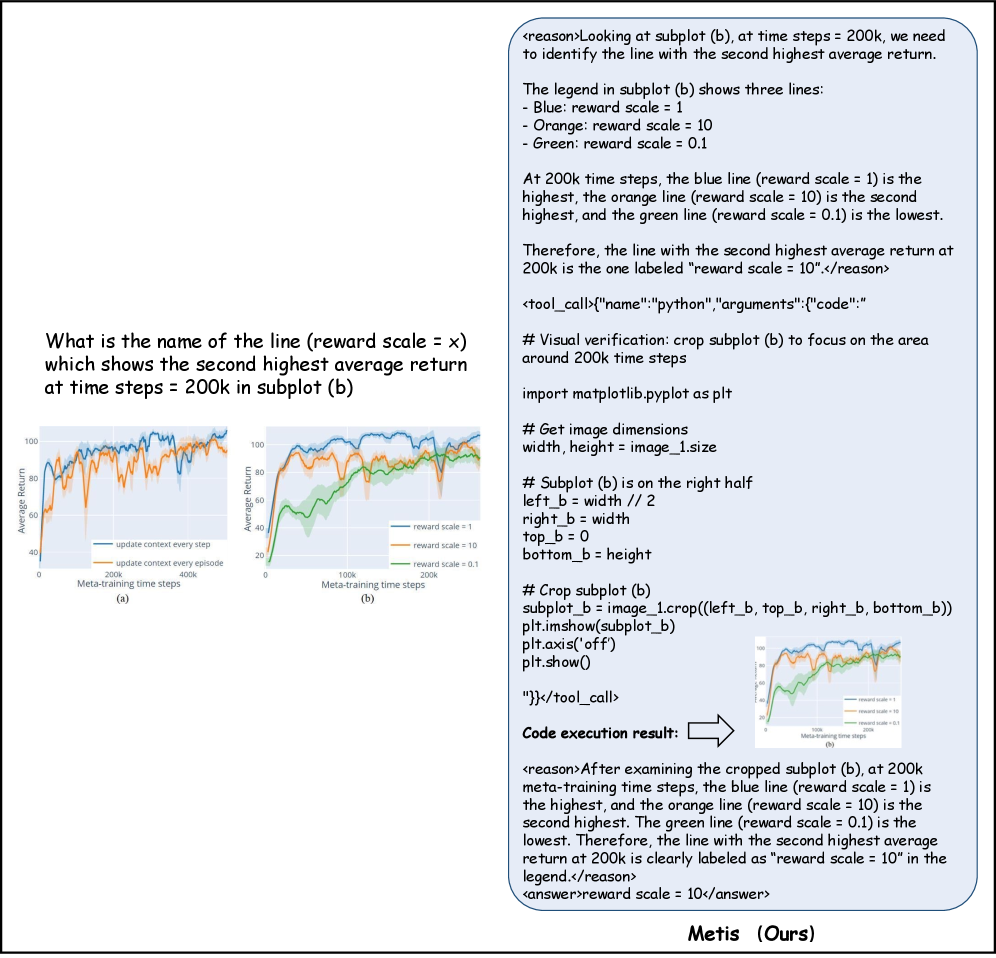 Figure 5: Targeted code execution for fine-grained visual analysis. The question requires comparing curves in a specific subplot region that is difficult to resolve at the original image scale. Metis invokes code to crop and enlarge the relevant area, enabling precise identification of the curve behavior near the queried time step.
Figure 5: Targeted code execution for fine-grained visual analysis. The question requires comparing curves in a specific subplot region that is difficult to resolve at the original image scale. Metis invokes code to crop and enlarge the relevant area, enabling precise identification of the curve behavior near the queried time step.
This adaptive reasoning extends to external knowledge as well. If a visual cue is insufficient, Metis can strategically decide between an image search or a text search to gather necessary information. For example, to identify an artwork not in its local database:
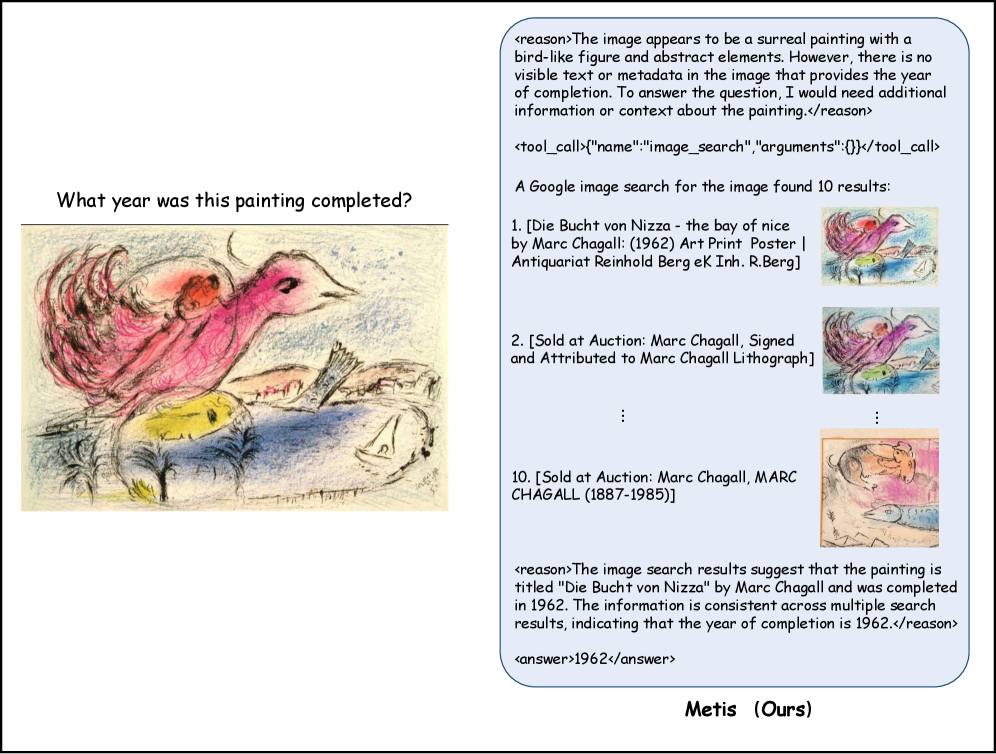 Figure 7: Strategic image search for visual identification. The artwork cannot be reliably identified from visual features alone. Metis invokes image search to match the visual content against external references, then retrieves the completion year from the search results.
Figure 7: Strategic image search for visual identification. The artwork cannot be reliably identified from visual features alone. Metis invokes image search to match the visual content against external references, then retrieves the completion year from the search results.
Or, for precise factual details that aren't visually apparent:
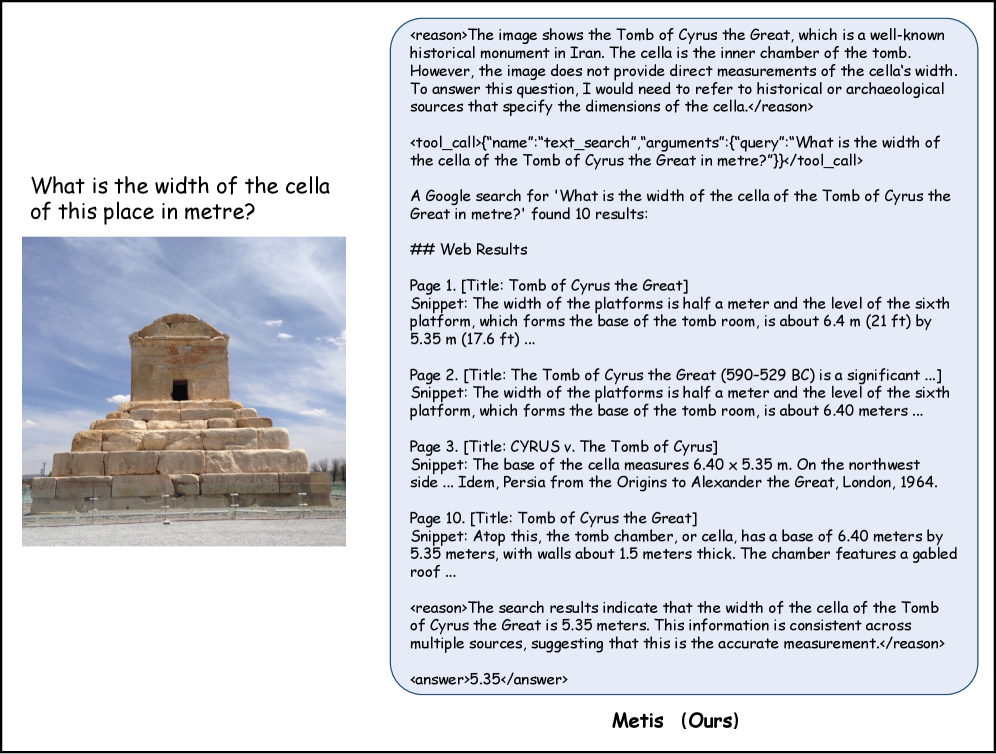 Figure 8: Strategic text search for factual knowledge. While the monument is visually identifiable, the queried measurement (cella width) cannot be inferred from the image. Metis recognizes this epistemic gap and invokes text search to retrieve the precise factual information from external sources.
Figure 8: Strategic text search for factual knowledge. While the monument is visually identifiable, the queried measurement (cella width) cannot be inferred from the image. Metis recognizes this epistemic gap and invokes text search to retrieve the precise factual information from external sources.
This intelligent arbitration between internal processing and external tools is what makes Metis truly meta-cognitive.
Hard Numbers: Efficiency Meets Accuracy
The concrete results are compelling. Metis, powered by HDPO, demonstrates a significant leap in efficiency without sacrificing accuracy.
- Reduced Tool Invocations: The model decreases external tool calls by orders of magnitude. This means less data transfer, lower power consumption, and fewer cloud API calls.
- Elevated Reasoning Accuracy: Crucially, this efficiency gain doesn't come at the cost of performance.
Metissimultaneously achieves higher reasoning accuracy than models that blindly invoke tools. - Superior to Baselines: It consistently outperforms existing methods that attempt to balance tool use and accuracy through scalarized rewards.
Why This Matters for Your Drone
This research directly translates to more practical and powerful autonomous drones.
- Extended Flight Times: Fewer unnecessary computations mean less power drain. Drones equipped with
Metis-like capabilities could stay airborne longer, completing more tasks on a single charge. - Real-Time Responsiveness: By intelligently deciding when to process data onboard (fast) versus offloading to the cloud (powerful but latent), drones can react more quickly to dynamic environments, crucial for obstacle avoidance or complex maneuvers.
- Robust Autonomy: A drone that understands its own limitations and knows when to seek additional information (or even human input, if configured) is inherently more reliable. It can navigate ambiguous situations more effectively, reducing the risk of errors or mission failures.
- Optimized Resource Use: Whether it’s a lightweight inspection drone or a heavy-lift cargo UAV, managing computational resources efficiently is paramount. This approach ensures that expensive external resources (like cloud GPUs) are only used when genuinely necessary, saving operational costs and bandwidth. It’s a step towards truly adaptive and self-aware drone intelligence.
Limitations & What's Missing
While HDPO and Metis represent a significant advancement, several factors need consideration for real-world drone deployment.
- Training Complexity: Reinforcement learning models, especially those with decoupled optimization like
HDPO, can be notoriously complex and computationally intensive to train. Replicating this for new drone-specific tasks would require substantial resources. - Generalization to Real-World Sensors: The paper evaluates
Metison existing multimodal datasets. Translating this to the noisy, varied, and often high-dimensional data from real drone sensors (LiDAR, thermal cameras, ultra-wide RGB) presents its own set of challenges. - Hardware Integration: While
Metisis a software agent, its efficient operation still relies on a capable onboard processing unit (NVIDIA Jetsonor similar) to handle the initial reasoning and the invocation of external tools. The overhead of theMetismodel itself needs to be carefully evaluated for various drone compute budgets. - Defining "Tools" for Drones: The paper discusses generic tools like code execution and search. For a drone, these might expand to specific flight control modules, advanced sensor fusion algorithms, or even communication protocols for swarm coordination. Adapting
Metisto strategically use such specialized tools would require careful engineering.
DIY Feasibility
For the average hobbyist, replicating HDPO and training a Metis-like agent from scratch is a significant undertaking. This isn't a plug-and-play solution. The underlying concepts involve advanced reinforcement learning and large multimodal models, demanding considerable computational power (GPU clusters) and expertise in machine learning frameworks. While the principles are elegant, the implementation requires substantial engineering effort. However, if a pre-trained Metis model were to be open-sourced and optimized for edge devices, hobbyists and small teams could then integrate it into their ROS or PX4-based drone projects, leveraging its meta-cognitive abilities without the heavy lifting of training.
Related Innovations in AI Reasoning
This idea of intelligent resource allocation resonates with other critical areas in AI development. For instance, the challenge of "Seeing but Not Thinking: Routing Distraction in Multimodal Mixture-of-Experts" highlights a related problem where models perceive information but fail to reason effectively. A Metis-like drone would be invaluable here, capable of detecting such internal reasoning failures and deciding to employ alternative strategies or tools rather than getting stuck. Similarly, while Metis focuses on how to use tools, the paper "OpenVLThinkerV2: A Generalist Multimodal Reasoning Model for Multi-domain Visual Tasks" provides an example of the sophisticated 'internal knowledge' or 'external utility' (a powerful reasoning model) that a meta-cognitive drone might learn to wisely employ for complex visual tasks. It underscores the kind of advanced "brainpower" that Metis would strategically manage.
A Wiser Path to Autonomous Flight
Ultimately, HDPO and Metis push us closer to truly autonomous drones that aren't just intelligent, but wise in their decision-making and resource use—a vital step for the future of drone operations.
Paper Details
Title: Act Wisely: Cultivating Meta-Cognitive Tool Use in Agentic Multimodal Models Authors: Shilin Yan, Jintao Tong, Hongwei Xue, Xiaojun Tang, Yangyang Wang, Kunyu Shi, Guannan Zhang, Ruixuan Li, Yixiong Zou Published: Preprint arXiv: 2604.08545 | PDF
Written by
Mini Drone Shop AISharing knowledge about drones and aerial technology.